Boids¶
Shared by Antoine Rideau
The flock is composed of N boids and will fly during nt steps within a perimeter described by dimension
// Parameters
int N = 100; // Number of boids
int nt = 300; // Number of time steps
matrix<> dimension = {50, 50}; // Permieter lengths
matrix<> and then gathered inside the std::vector Boids.Out contains these parameters at each steps in order to output them later on for a satisfaying visualization.// Initialization
std::vector<matrix<>> Boids = { rand(1, N,true) * dimension(0), // Boids x position
rand(1, N) * dimension(1), // Boids y position
rand(1, N,true) * maxSpeed - maxSpeed / 2, // Boids x velocity : dx
rand(1, N) * maxSpeed - maxSpeed / 2}; // Boids y velocity : dy
matrix<> Out = cat(1, Boids[0], cat(1, Boids[1], cat(1, Boids[2], Boids[3])));
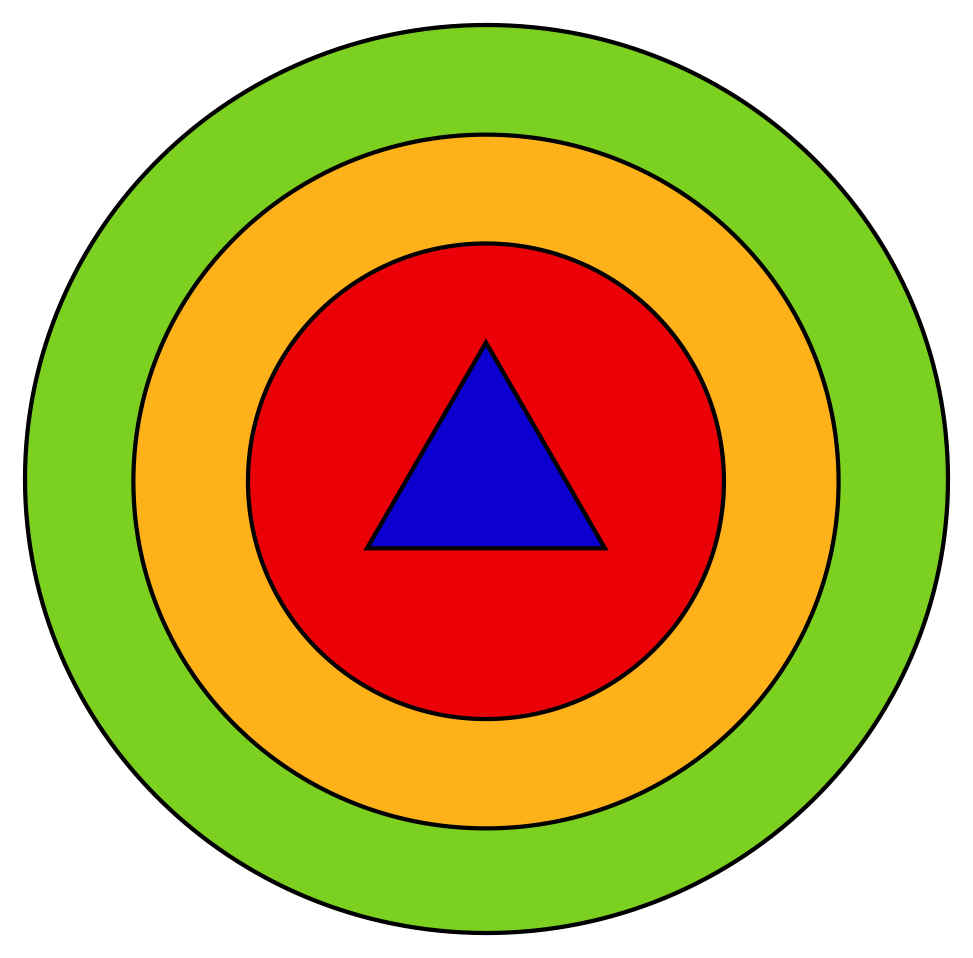
Neighbourhood of a boid (blue) : zone of separation (red), zone of alignement (yellow) and zone of cohesion (green).¶
So as to apply the set of rules to each boid, it is needed to determine this boid’s flockmates depending on the distance between this boid and the others boids.
This is done by the function boidsWithinDistance which returns the index of the boids who are inside the circle of distance radius around the boid of index boidIndex.
matrix<size_t> boidsWithinDistance(std::vector<matrix<>> &Boids, int boidIndex, double distance)
{
matrix<size_t> I(boidIndex);
return setdiff(find(sqrt((Boids[0](boidIndex) - Boids[0]) * (Boids[0](boidIndex) - Boids[0]) + (Boids[1](boidIndex) - Boids[1]) * (Boids[1](boidIndex) - Boids[1])) < distance), I);
}
Behaviour¶
Borders¶
Boids must stay within the borders.
// Constrain boids to within the borders. If it gets too close to an edge,nudge it back in and reverse its direction. void stayWithinBorders(std::vector<matrix<>> &Boids, matrix<> border, double margin, double turnFactor) { auto xTooLow = find(Boids[0] < margin); auto xTooHigh = find(Boids[0] > border(0) - margin); auto yTooLow = find(Boids[1] < margin); auto yTooHigh = find(Boids[1] > border(1) - margin); if (numel(xTooLow) > 0){Boids[2](xTooLow) = eval(Boids[2](xTooLow)) + turnFactor;} if (numel(xTooHigh) > 0){Boids[2](xTooHigh) = eval(Boids[2](xTooHigh)) - turnFactor;} if (numel(yTooLow) > 0){Boids[3](yTooLow) = eval(Boids[3](yTooLow)) + turnFactor;} if (numel(yTooHigh > 0)){Boids[3](yTooHigh) = eval(Boids[3](yTooHigh)) - turnFactor;} }
Like Pacman, boids who go out by one side are wrap around to the other side.
// Checks if boids go out of the window and if so, wraps them around to the other side. void wrapBorders(std::vector<matrix<>> &Boids, matrix<> border) { auto xTooLow = find(Boids[0] < 0); auto xTooHigh = find(Boids[0] > border(0)); auto yTooLow = find(Boids[1] < 0); auto yTooHigh = find(Boids[1] > border(1)); if (numel(xTooLow) > 0){Boids[0](xTooLow) = eval(Boids[0](xTooLow)) + border(0);} if (numel(xTooHigh) > 0){Boids[0](xTooHigh) = eval(Boids[0](xTooHigh)) - border(0);} if (numel(yTooLow) > 0){Boids[1](yTooLow) = eval(Boids[1](yTooLow)) + border(1);} if (numel(yTooHigh > 0)){Boids[1](yTooHigh) = eval(Boids[1](yTooHigh)) - border(1);} }
Separation¶
For each boid, once flockmates within separationDistance are known, velocity vector is ajusted toward the opposite directions of flockmates’ positions.
// Boids try to keep a small distance away from other boids
void separation(std::vector<matrix<>> &Boids, double separationDistance, double separationFactor)
{
for (int i = 0; i < numel(Boids[0]); i++)
{
auto FlockMates = boidsWithinDistance(Boids, i, separationDistance);
if (numel(FlockMates) > 0)
{
Boids[2](i) += sum(Boids[0](i) - eval(Boids[0](FlockMates))) * separationFactor;
Boids[3](i) += sum(Boids[1](i) - eval(Boids[1](FlockMates))) * separationFactor;
}
}
}
Alignement¶
For each boid, once flockmates within alignementDistance are known, velocity vector is ajusted toward the average direction of flockmates’ velocity vector.
// Boids try to match velocity with near boids
void alignement(std::vector<matrix<>> &Boids, double alignementDistance, double alignementFactor)
{
for (int i = 0; i < numel(Boids[0]); i++)
{
auto FlockMates = boidsWithinDistance(Boids, i, alignementDistance);
if (numel(FlockMates) > 0)
{
Boids[2](i) += (sum(eval(Boids[2](FlockMates))) / numel(FlockMates)) * alignementFactor;
Boids[3](i) += (sum(eval(Boids[3](FlockMates))) / numel(FlockMates)) * alignementFactor;
}
}
}
Cohesion¶
For each boid, once flockmates within cohesionDistance are known, velocity vector is ajusted toward the average position of flockmates.
// Boids try to fly towards the centre of mass of neighbouring boids
void cohesion(std::vector<matrix<>> &Boids, double cohesionDistance, double cohesionFactor)
{
for (int i = 0; i < numel(Boids[0]); i++)
{
auto FlockMates = boidsWithinDistance(Boids, i, cohesionDistance);
if (numel(FlockMates) > 0)
{
Boids[2](i) += ((sum(eval(Boids[0](FlockMates))) / numel(FlockMates)) - Boids[0](i)) * cohesionFactor;
Boids[3](i) += ((sum(eval(Boids[1](FlockMates))) / numel(FlockMates)) - Boids[1](i)) * cohesionFactor;
}
}
}
Speed limitation¶
Once the rules are applied on the boids, their speed is limited to maxSpeed .
void limitSpeed(std::vector<matrix<>> &Boids, double maxSpeed)
{
auto Speed = sqrt(Boids[2] * Boids[2] + Boids[3] * Boids[3]);
matrix<> I = find(Speed > maxSpeed); //Index where velocity > maxSpeed
if (numel(I) > 0)
{
Boids[2](I) = (eval(Boids[2](I)) / eval(Speed(I))) * maxSpeed;
Boids[3](I) = (eval(Boids[3](I)) / eval(Speed(I))) * maxSpeed;
}
}
Visualisation¶
Out are written in text file.writetxt("../", "data.txt", Out);
import matplotlib.pyplot as plt
import matplotlib.animation as animation
import matplotlib.patches as patches
import numpy as np
data = np.loadtxt("./data.txt", skiprows=1)
# print(data)
nt = int(data.shape[0]/4)
N = int(data.shape[1])
xs = [data[i*4, :] for i in range(nt)]
ys = [data[i*4+1, :] for i in range(nt)]
dxs = [data[i*4+2, :] for i in range(nt)]
dys = [data[i*4+3, :] for i in range(nt)]
# Visu initialization
fig, ax = plt.subplots()
p = patches.Rectangle((0, 0), 50, 50, fill=True)
ax.add_artist(p)
ax.set_xlim(0, 50)
ax.set_ylim(0, 50)
ax.set_aspect('equal')
# Length of velocity vector to then normalize its representation
D = [np.sqrt((dxs[0][i])**2+(dys[0][i])**2) for i in range(N)]
boids = [ax.annotate("", xy=(xs[0][i]+dxs[0][i]/D[i], ys[0][i] + dys[0][i]/D[i]), xytext=(xs[0][i], ys[0][i]), arrowprops={
"facecolor": "red", 'arrowstyle': 'wedge'})for i in range(N)]
def animate(frame):
for i in range(N):
d = np.sqrt((dxs[frame][i])**2+(dys[frame][i])**2)
pos = np.array([xs[frame][i], ys[frame][i]])
boids[i].set_position(pos)
boids[i].xy = pos + (dxs[frame][i]/d, dys[frame][i]/d)
return boids
# Creating the Animation object
ani = animation.FuncAnimation(
fig, animate, nt, interval=40, blit=True, repeat_delay=1000)
plt.show()
Code¶
Here is all the code at once, without the functions written above :
int main(int argc, char const *argv[])
{
// Parameters
int N = 100; // Number of boids
int nt = 300; // Number of time steps
matrix<> dimension = {50, 50};
double margin = 2.;
double turnFactor = 1.;
double maxSpeed = 1.5;
double separationDistance = 2.0;
double separationFactor = 0.05;
double alignementDistance = 7.5;
double alignementFactor = 0.10;
double cohesionDistance = 8.5;
double cohesionFactor = 0.03;
// Initialization
std::vector<matrix<>> Boids = { rand(1, N,true) * dimension(0), // Boids x position
rand(1, N) * dimension(1), // Boids y position
rand(1, N,true) * maxSpeed - maxSpeed / 2, // Boids x velocity : dx
rand(1, N) * maxSpeed - maxSpeed / 2}; // Boids y velocity : dy
matrix<> Out = cat(1, Boids[0], cat(1, Boids[1], cat(1, Boids[2], Boids[3])));
disp(Out);
tic();
for (int t = 0; t < nt; t++)
{
separation(Boids, separationDistance, separationFactor);
alignement(Boids, alignementDistance, alignementFactor);
cohesion(Boids, cohesionDistance, cohesionFactor);
limitSpeed(Boids, maxSpeed);
stayWithinBorders(Boids, dimension, margin, turnFactor);
// Update positions
Boids[0] += Boids[2];
Boids[1] += Boids[3];
// wrapBorders(Boids, dimension);
for (int i = 0; i < 4; i++)
{
Out = cat(1, Out, Boids[i]);
}
}
toc();
writetxt("../", "data.txt", Out);
return 0;
}
References¶
https://en.wikipedia.org/wiki/Boids