N-body problem¶
Shared by Antoine Rideau
|
|||
|---|---|---|---|
Sun and inner planet |
\(m_{0}\) = 1.00000597682 |
||
Jupiter |
\(m_{1}\) = 0.000954786104043 |
||
Saturn |
\(m_{2}\) = 0.000285583733151 |
||
Gravitational constant \(G = 2.95912208286 \times 10^{-4}\) |
|||
// Parameters
matrix<> m = {{1.00000597682}, {9.54786104043e-4}, {2.85583733151e-4}}; // Masses : Sun, Jupiter and Saturn
double G = 2.95912208286e-4; //Gravitation's constant
The position of a object over time is given by \(q(t)\).
Bodies |
Initial position (AU) |
|---|---|
Sun |
0 |
0 |
|
0 |
|
Jupiter |
−3.5023653 |
−3.8169847 |
|
−1.5507963 |
|
Saturn |
9.0755314 |
−3.0458353 |
|
−1.6483708 |
where AU stands for astronomical unit and \(1 AU = 1.495 978 707 \times 10^{11}\) m.
matrix<> qini = {0, 0, 0, // Sun's initial position
-3.5023653, -3.8169847, -1.5507963, // Jupiter's initial position
9.0755314, -3.0458353, -1.6483708}; // Saturn's initial position
Bodies |
Initial velocity (AU/day) |
|---|---|
Sun |
0 |
0 |
|
0 |
|
Jupiter |
0.00565429 |
0.00565429 |
|
−0.00190589 |
|
Saturn |
0.00168318 |
0.00483525 |
|
0.00192462 |
matrix<> vini = {0, 0, 0, // Sun's initial velocity
0.00565429, -0.00412490, -0.00190589, // Jupiter's initial velocity
0.00168318, 0.00483525, 0.00192462}; // Saturn's initial velocity
matrix<> pini = reshape(mtimes(transpose(m), ones(1, numel(m))), 1, numel(vini)) * vini; // Initial momentums
See reshape , mtimes, transpose, ones, numel.
Time is discretized into nt steps
// Disretization
int nt = 1501;
double dt = (tend - tini) / (nt - 1);
auto T = linspace(tini, tend, nt);
See linspace.
Scheme¶
where
With such a separation, Hamilton equation are given by
where
which result to the symplectic Euler scheme :
// Scheme
auto Q = zeros(nt, numel(qini));
Q(0, col(Q)) = qini;
auto P = zeros(nt, numel(pini));
P(0, col(P)) = pini;
// Symplectic Euler
for (int it = 0; it < nt - 1; it++)
{
matrix<> q_n = eval(Q(it, col(Q)));
matrix<> p_n = eval(P(it, col(P)));
Q(it + 1, col(Q)) = q_n + dt * H_p(G, m, p_n);
P(it + 1, col(P)) = p_n - dt * H_q(G, m, eval(Q(it + 1, col(Q))));
}
In the code, \(\displaystyle \frac{\mathrm{d} K}{\mathrm{d} p}(p)\) is represented by the function H_p
matrix<> H_p(double G, matrix<> m, matrix<> p)
{
auto Hp = zeros(1, numel(p));
m = reshape(mtimes(transpose(m), ones(1, numel(m))), 1, numel(p));
Hp = p / m;
return Hp;
}
See zeros, reshape , mtimes, transpose, ones, numel.
and \(\displaystyle \frac{\mathrm{d} V}{\mathrm{d} q}(q)\) by the function H_q
matrix<> H_q(double G, matrix<> m, matrix<> q)
{
auto q0 = eval(q(range(0, 3)));
auto q1 = eval(q(range(3, 6)));
auto q2 = eval(q(range(6, 9)));
auto Hq = zeros(1, 9);
Hq(range(0, 3)) = (G * m(0) * m(1) * ((q0 - q1) / pow(norm(q0 - q1), 3)) + G * m(0) * m(2) * ((q0 - q2) / pow(norm(q0 - q2), 3)));
Hq(range(3, 6)) = (G * m(1) * m(0) * ((q1 - q0) / pow(norm(q1 - q0), 3)) + G * m(1) * m(2) * ((q1 - q2) / pow(norm(q1 - q2), 3)));
Hq(range(6, 9)) = (G * m(2) * m(0) * ((q2 - q0) / pow(norm(q2 - q0), 3)) + G * m(2) * m(1) * ((q2 - q1) / pow(norm(q2 - q1), 3)));
return Hq;
}
Visualisation¶
Simple figure with Castor¶
plot or plot3, here plot3 is used to show the motion in 3 dimensions.transpose is needed because of matrix Q ‘s dimensions.// Visu
figure fig;
plot3(fig, transpose(eval(Q(row(Q), 3)) - eval(Q(row(Q), 0))), transpose(eval(Q(row(Q), 4)) - eval(Q(row(Q), 1))), transpose(eval(Q(row(Q), 5)) - eval(Q(row(Q), 2))), {"c"});
plot3(fig, transpose(eval(Q(row(Q), 6)) - eval(Q(row(Q), 0))), transpose(eval(Q(row(Q), 7)) - eval(Q(row(Q), 1))), transpose(eval(Q(row(Q), 8)) - eval(Q(row(Q), 2))), {"b"});
plot3(fig, zeros(1, nt), zeros(1, nt), zeros(1, nt), {"y"});
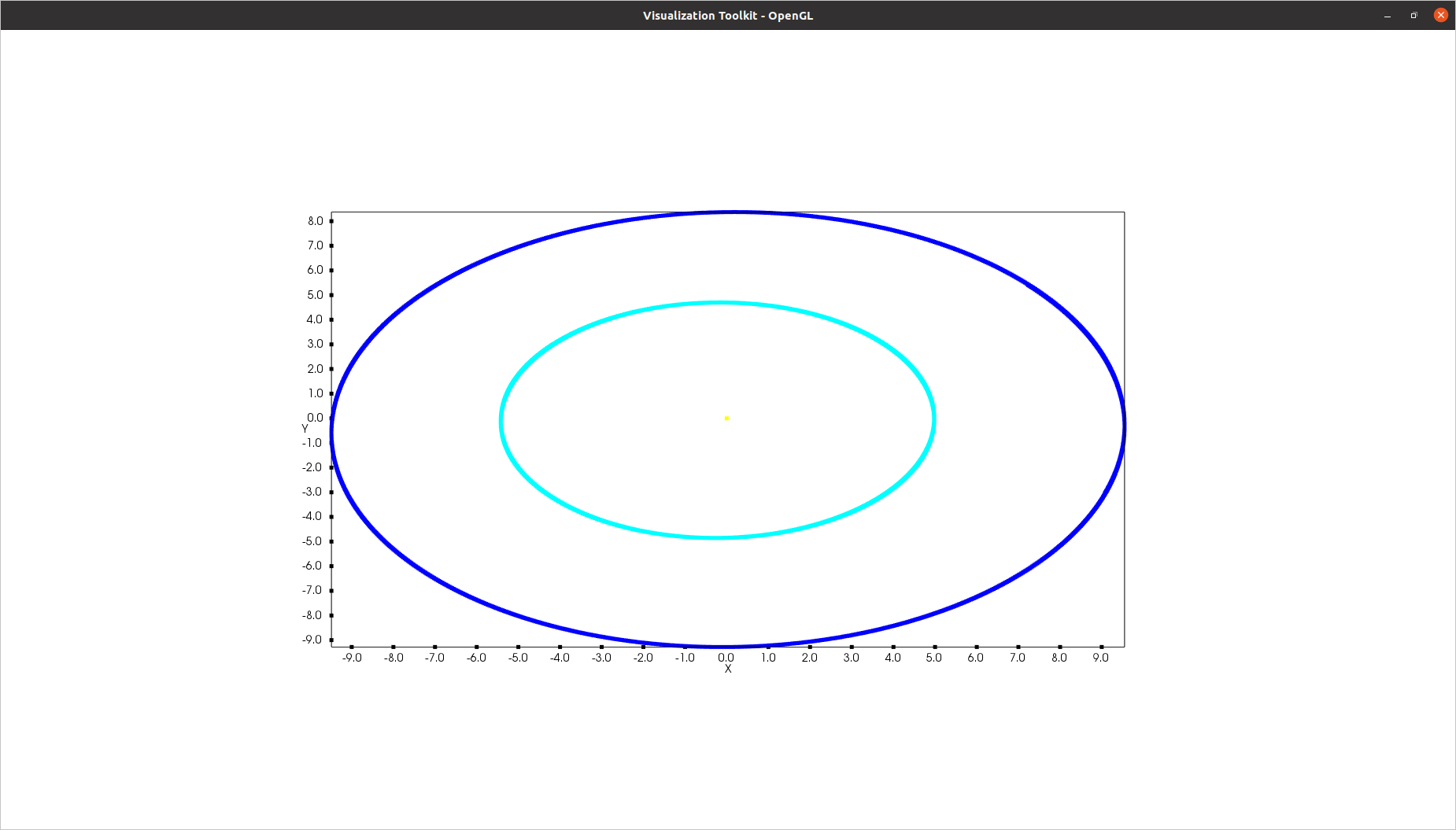
Orbits of Jupiter (cyan) and Saturn (blue) around the Sun (yellow) in the center.¶
Video output with VTK¶
// Initialize source and movie
vtkNew<vtkWindowToImageFilter> source;
vtkNew<vtkOggTheoraWriter> movie;
movie->SetInputConnection(source->GetOutputPort());
movie->SetFileName("nbody.avi");
movie->SetQuality(2); // in [0,2]
movie->SetRate(25); // frame per seconds
int Nplot = 150; // < 200
Afterwards, the writer is initiated before the loop over time.
movie->Start();
for (int it = 0; it < nt - 1; it++){...}
Then each wanted frame is plotted and added to the final movie.
// Visu
if (it % (nt / Nplot) == 0)
{
figure fig;
matrix<> limits = {-10, 10};
plot(fig, {Q(it, 3) - Q(it, 0)}, {Q(it, 4) - Q(it, 1)}, {"c"});
plot(fig, {Q(it, 6) - Q(it, 0)}, {Q(it, 7) - Q(it, 1)}, {"b"});
plot(fig, zeros(1), zeros(1), {"y"});
xlim(fig, limits);
ylim(fig, limits);
source->SetInput(fig.GetView()->GetRenderWindow());
source->SetInputBufferTypeToRGB();
source->ReadFrontBufferOff();
movie->Write();
}
See plot, label-xlim, label-ylim.
Finally, the writer is closed after the loop over time.
for (int it = 0; it < nt - 1; it++){...}
movie->End();
Video animation with Python¶
Q are stored in a .txt file using writetxt .// Output
writetxt("./", "dataJu.txt", cat(2, eval(Q(row(Q), 3)) - eval(Q(row(Q), 0)), eval(Q(row(Q), 4)) - eval(Q(row(Q), 1))));
writetxt("./", "dataSa.txt", cat(2, eval(Q(row(Q), 6)) - eval(Q(row(Q), 0)), eval(Q(row(Q), 7)) - eval(Q(row(Q), 1))));
Then the following Python code shows the beautiful animation.
import matplotlib.pyplot as plt
import matplotlib.animation as animation
import numpy as np
from collections import deque
# Data input
dataJu = np.loadtxt("./build/dataJu.txt")
dataSa = np.loadtxt("./build/dataSa.txt")
# Parameters extraction
nt = int(dataJu[0, 0])
# Data processing
dataJu = np.delete(dataJu, 0, 0)
dataSa = np.delete(dataSa, 0, 0)
# Visu initialization
fig = plt.figure(figsize=(5, 4))
ax = fig.add_subplot(autoscale_on=False, xlim=(-10, 10), ylim=(-10, 10))
ax.set_aspect('equal')
line, = ax.plot([], [], 'o', lw=2)
traceJu, = ax.plot([], [], ',-', lw=1)
traceSa, = ax.plot([], [], ',-', lw=1)
historyJu_x, historyJu_y = deque(maxlen=nt), deque(maxlen=nt)
historySa_x, historySa_y = deque(maxlen=nt), deque(maxlen=nt)
def animate(i):
# Get planets' current positions
thisx = [0, dataJu[i, 0], dataSa[i, 0]]
thisy = [0, dataJu[i, 1], dataSa[i, 1]]
# Clear the trace when the animation loops
if i == 0:
historyJu_x.clear()
historyJu_y.clear()
historySa_x.clear()
historySa_y.clear()
# Add the current position to the trace
historyJu_x.appendleft(thisx[1])
historyJu_y.appendleft(thisy[1])
historySa_x.appendleft(thisx[2])
historySa_y.appendleft(thisy[2])
line.set_data(thisx, thisy) # Update planets' positions
# Update planets' traces
traceJu.set_data(historyJu_x, historyJu_y)
traceSa.set_data(historySa_x, historySa_y)
return line, traceJu, traceSa
# Creating the Animation object
ani = animation.FuncAnimation(
fig, animate, nt, interval=10, blit=True)
plt.show()
Code¶
Here is all the code at once, without the functions H_q and H_p written above :
#include "castor/matrix.hpp"
#include "castor/graphics.hpp"
#include "castor/linalg.hpp"
using namespace castor;
int main(int argc, char const *argv[])
{
// Parameters
matrix<> m = {1.00000597682, 9.54786104043e-4, 2.85583733151e-4}; // Masses : Sun, Jupiter and Saturn
double G = 2.95912208286e-4; //Gravitation's constant
matrix<> qini = {0, 0, 0, // Sun's initial position
-3.5023653, -3.8169847, -1.5507963, // Jupiter's initial position
9.0755314, -3.0458353, -1.6483708}; // Saturn's initial position
matrix<> vini = {0, 0, 0, // Sun's initial velocity
0.00565429, -0.00412490, -0.00190589, // Jupiter's initial velocity
0.00168318, 0.00483525, 0.00192462}; // Saturn's initial velocity
matrix<> pini = reshape(mtimes(transpose(m), ones(1, numel(m))), 1, numel(vini)) * vini; // Initial momentums
double tini = 0.;
double tend = 12500.;
// Disretization
int nt = 1501;
double dt = (tend - tini) / (nt - 1);
auto T = linspace(tini, tend, nt);
// Initialize source and movie
vtkNew<vtkWindowToImageFilter> source;
vtkNew<vtkOggTheoraWriter> movie;
movie->SetInputConnection(source->GetOutputPort());
movie->SetFileName("nbody.avi");
movie->SetQuality(2); // in [0,2]
movie->SetRate(25); // frame per seconds
int Nplot = 150; // < 200
// Scheme
auto Q = zeros(nt, numel(qini));
Q(0, col(Q)) = qini;
auto P = zeros(nt, numel(pini));
P(0, col(P)) = pini;
// Symplectic Euler
tic();
movie->Start();
for (int it = 0; it < nt - 1; it++)
{
matrix<> q_n = eval(Q(it, col(Q)));
matrix<> p_n = eval(P(it, col(P)));
Q(it + 1, col(Q)) = q_n + dt * H_p(G, m, p_n);
P(it + 1, col(P)) = p_n - dt * H_q(G, m, eval(Q(it + 1, col(Q))));
// Visu
if (it % (nt / Nplot) == 0)
{
figure fig;
matrix<> L({-10, 10, -10, 10}); // Axis dimensions
plot(fig, Q(it, 3) - Q(it, 0) * ones(1), Q(it, 4) - Q(it, 1) * ones(1), L, {"c"});
plot(fig, Q(it, 6) - Q(it, 0) * ones(1), Q(it, 7) - Q(it, 1) * ones(1), L, {"b"});
plot(fig, zeros(1), zeros(1), {"y"});
source->SetInput(fig.GetView()->GetRenderWindow());
source->SetInputBufferTypeToRGB();
source->ReadFrontBufferOff();
movie->Write();
}
}
movie->End();
toc();
// Output for Python post-processing and visualisation
// writetxt("./", "dataJu.txt", cat(2, eval(Q(row(Q), 3)) - eval(Q(row(Q), 0)), eval(Q(row(Q), 4)) - eval(Q(row(Q), 1))));
// writetxt("./", "dataSa.txt", cat(2, eval(Q(row(Q), 6)) - eval(Q(row(Q), 0)), eval(Q(row(Q), 7)) - eval(Q(row(Q), 1))));
// Visu in native Castor
// figure fig;
// plot3(fig, transpose(eval(Q(row(Q), 3)) - eval(Q(row(Q), 0))), transpose(eval(Q(row(Q), 4)) - eval(Q(row(Q), 1))), transpose(eval(Q(row(Q), 5)) - eval(Q(row(Q), 2))), {"c"});
// plot3(fig, transpose(eval(Q(row(Q), 6)) - eval(Q(row(Q), 0))), transpose(eval(Q(row(Q), 7)) - eval(Q(row(Q), 1))), transpose(eval(Q(row(Q), 8)) - eval(Q(row(Q), 2))), {"b"});
// plot3(fig, zeros(1, nt), zeros(1, nt), zeros(1, nt), {"y"});
// drawnow(fig);
return 0;
}